The UK-led Beagle 2 Mars Lander, thought lost on Mars since 2003, has been found partially deployed on the surface of the planet. As announced on 16 January 2015, this ends the mystery of what happened to the mission more than a decade ago after contact with Beagle 2 was lost.
Images taken by the HiRISE camera on NASA’s Mars Reconnaissance Orbiter (MRO) were initially analysed by Michael Croon of Trier, Germany, a former member of ESA’s Mars Express operations team at European Space Operations Centre (ESOC). He and others have now identified clear evidence for the lander and convincing evidence for key entry and descent components on the surface of Mars within the expected landing area of Isidis Planitia, an impact basin close to the equator.
This find shows that the Entry, Descent and Landing (EDL) sequence for Beagle 2 worked and the lander did successfully touchdown on Mars on Christmas Day 2003. Beagle 2 hitched a ride to Mars on ESA’s Mars Express mission and was a collaboration between industry and academia. It would have delivered world-class science from the surface of the Red Planet. Many UK academic groups and industrial companies contributed to Beagle 2.
Red planet ahead
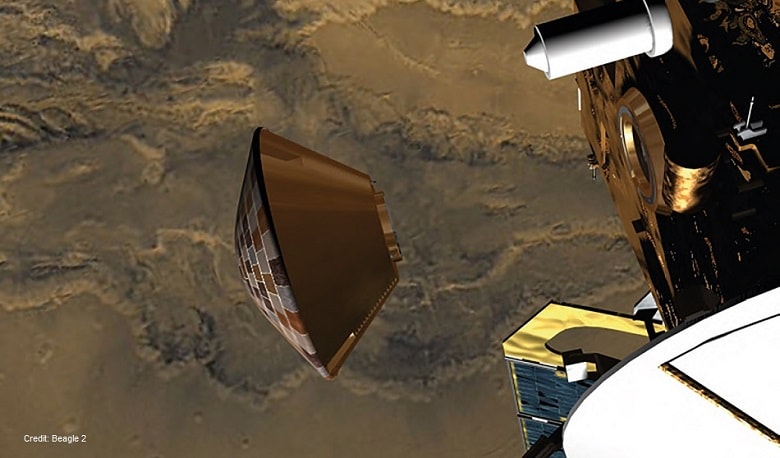
Beagle 2 was part of the ESA Mars Express (MEx) Mission launched in June 2003. Mars Express is still orbiting Mars and returning scientific data on the planet. Beagle 2 was successfully ejected from ESA’s Mars Express spacecraft on 19 December 2003, 5.75 days away from Mars prior to Mars Express’s engine firing and orbital injection.
Since the loss, Michael Croon and members of the Beagle 2 industrial and scientific teams have been patiently screening images taken by the HiRISE camera on Mars Reconnaissance Orbiter (MRO). HiRISE has been taking occasional pictures of the landing site in addition to pursuing its scientific studies of the surface of Mars.
…the Entry, Descent and Landing (EDL) sequence for Beagle 2 worked and the lander did successfully touchdown on Mars on Christmas Day 2003.
The planned landing area for Beagle 2 at the time of launch was approximately 170x100km within Isidis Planitia. With a fully-deployed Beagle 2 being less than a few metres across and a camera resolution of around 25cm, detection was a very difficult and painstaking task.
The initial detection came from HiRISE images ESP_037145_1915 and ESP_030908_1915 taken on 28 February 2013 and 29 June 2014. Subsequent reimaging and analysis by the Beagle 2 team, HiRISE team and NASA’s Jet Propulsion Laboratory (JPL) has confirmed that the targets discovered are of the correct size, shape, colour and dispersion (i.e. separation) to be Beagle 2.
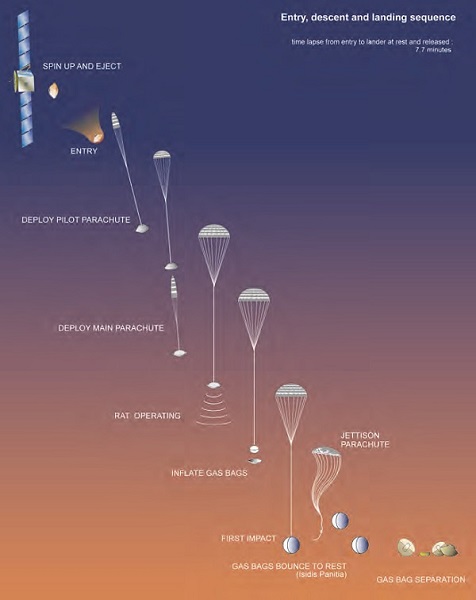 The entry, descent and landing sequence for Beagle 2.
The entry, descent and landing sequence for Beagle 2.
The images show the Beagle 2 lander in what appears to be a partially deployed configuration, with what is thought to be the rear cover with its pilot/ drogue chute (still attached as intended) and the main parachute close by. The locations of the front heat shield and the airbags remain to be identified. The targets are within the expected landing area at a distance of around 5km from its centre.
Several interpretations of the image of the lander have been identified, consistent with the lander’s size and shape. The imaging data is however consistent with only a partial deployment following landing. This would explain why no signal or data was received from the lander as full deployment of all solar panels was needed to expose the RF antenna which would transmit data and receive commands from Earth via Mars orbiting spacecraft such as ESA’s Mars Express Mission and NASA’s Odyssey or NASA’s MRO spacecraft.
Unfortunately given the partial deployment and the resulting covering of the RF antenna, it would not be possible to revive Beagle 2 and recover data from it.
Entry Descent and Landing
Beagle 2 separated from MEx on the 19 December 2003 with a stabilising 11 rpm spin rate. A little less than 6 days after leaving MEx and 2.5 hours before reaching the top of the Martian atmosphere, Beagle 2 woke up automatically at midnight Christmas Day to start the Entry, Descent and Landing sequence. This was composed of 33 individual tasks and functions each of which had no redundancy, with the exception of the sensing accelerometers.
From entering the atmosphere at 20,000 kilometres per hour to first impact with the ground at 16 metres/second, took a little less than 8 minutes. During that time, Beagle 2 was slowed by a combination of aerobraking, a 1.9 metre drogue parachute and a 10 metre main parachute, all under the control of the probe’s software. The spacecraft bounced to a halt, cushioned by 2-metrewide airbags. Once it detected that Beagle 2 was stationary, the software commanded the 3 airbag segments to be released, allowing the lander to fall to the surface. All in all, Beagle 2 survived a 400g impact shock. Finally the probe released the lander clamp band before handing over to the on-surface operations software, enabling the deployment sequence to proceed.
Surface Operation
The initial task of the Lander software was to open the clamshell design, lifting the lid or the heavier base, whichever happens to be uppermost following the landing. Once open, the stack of 4 solar panels held down in the lid was released. All 5 hold-down devices had to function correctly to allow a panel to deploy. Under control of the software each panel was commanded to deploy in turn, using a series of angle monitoring threshold conditions. If any panel failed to meet the initial minimum requirement of 130°, the following panel would have been commanded after a timeout was reached. To achieve a design with sufficient RF signal strength, the UHF antenna was embedded in the lid and required all solar panels to deploy successfully.
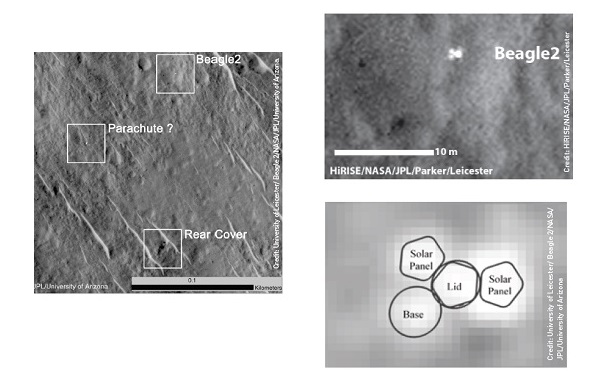
Beagle 2’s components on Mars.
A close-up, sharpened image of Beagle 2 Lander Target produced from two co-aligned HiRISE images.
An overlay of Beagle 2’s outline on the image data. This is one possible scenario for the partial deployment consistent with grey-scale image.
The front surface of each solar panel has 85% solar cell coverage providing a highly reflective surface. The back surface of the panels and the exposed surface of the lid is carbon fibre composite with a reflective resin rich surface. At 66 centimetres and 59 centimetres diameters respectively, the lander base and solar panels are only just more than 2 pixels wide in the raw HiRISE images.
What went wrong?
Based on everything that we can tell so far from the images, the entry descent and landing system of Beagle 2 appears to have been an engineering success, both in terms of hardware and probe software, although it cannot be ruled out as a contributing factor to the loss. On-surface operations clearly initiated and the deployment sequence activated successfully as demonstrated by at least one solar panel having deployed correctly. This partial deployment of solar panels demonstrates correct operation of Lander software.
So the reasons for the failure of these panels to fully open could include but are not limited to obstruction from an airbag segment remaining in the proximity of the lander, possibly due to mechanical hang-up or excessive gas leakage; a damaged mechanism or structure or a broken electrical connection, perhaps due to higher than expected shock loads during landing. The scenario involving the local terrain, including rocks blocking the deployment is considered unlikely given that images of the landing area show few rocks. Nevertheless, this cannot be ruled out. Slope and height derived from the HiRISE images by Aberystwyth University show that Beagle 2 landed on comparably flat terrain with no major hazards.
Further imaging and analysis is underway which is planned to narrow down the options, but of course we may never fully determine the real cause for the loss of Beagle 2. Nevertheless, from the evidence now available, Christmas Day 2003 marks the UK & Europe’s first and successful landing on another body in our Solar System.
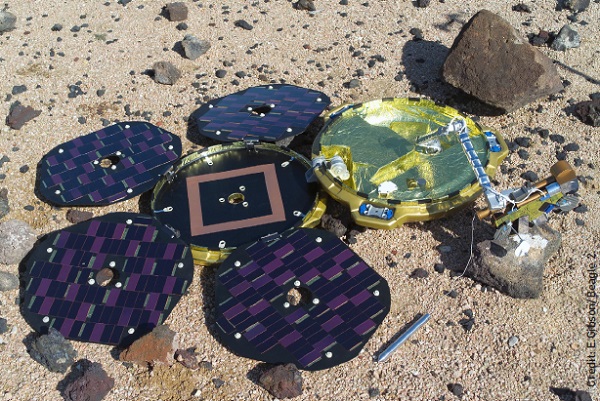 Beagle 2 as it should have deployed on Mars.
Beagle 2 as it should have deployed on Mars.
The Beagle 2 project and its design attracted criticism from some quarters after its loss; this discovery verifies that small landers are capable of landing on Mars, although changes would need to be made to any similar design to overcome some of the potential problems with such compact landers. ESA has issued requirements since Beagle 2 that landing modules should be in radio contact with orbiting spacecraft during the descent phase. An EDL communications system had been considered for Beagle 2 but no Mars orbiter would have been in position to receive the signal.
Professor Colin Pillinger from the Open University whose vision and inspirational enthusiasm led the Beagle 2 project sadly died in May 2014 before the lander was found on Mars. Others that provided major contributions to Beagle 2 were Professor George Fraser of the University of Leicester and Professor David Barnes of Aberystwyth University who also died in 2014. The successes of Beagle 2 would not have been possible without them.
Closing the circle
It is a delight to finally know the fate of Beagle 2. Every Christmas Day since 2003 we have wondered what happened to the lander. Like so many others, we had all but given up hope of ever knowing what happened on or above Mars that day. These images show that the whole team came so close to achieving the goal of science on Mars. The images vindicate the hard work put in by many people and companies both in the UK and around Europe and the world in building Beagle 2.
Beagle 2 inspired many people among the general public and led indirectly to the UK becoming a leading member of ESA’s Aurora programme and the ESA ExoMars mission. The UK is leading the design and building of the Rover for the ExoMars 2018 mission at Airbus Defence and Space, Stevenage. The rover will explore Mars drilling up to 2 metres beneath the soil, exploring the geochemistry and mineralogy of Mars and searching for potential evidence of past life.
Recent discoveries by the NASA Curiosity rover such as habitable environments on Mars, large lakes in the distant past, and sporadic releases of methane have greatly increased the chance of finding evidence that life in the form of micro-organisms might have existed, or might even still exist, on Mars.
This makes it clear that the science objectives set by Professor Pillinger for Beagle 2 remain just as valid, if not more so, today as they were in 2003. Further more, Beagle 2 has demonstrated that small, low cost, static landers, with high science return, can be placed onto the surface of Mars. Lessons have been learned from this first attempt.