he scientific focus of MOONWALK was to evaluate new technologies for the interaction of astronauts with helper robots on planetary surfaces. Between 2013 and 2016, a number of technologies and technical systems were demonstrated and tested in two Earth-analogue simulations of Extra-Vehicular Activities (EVA) on the Moon and Mars.
The simulated surface EVAs included egress and ingress from a planetary habitat (the result of another FP7 R&D project, the SHEE - Self-deployable Habitat for Extreme Environments - was used for this purpose), exploration and scouting of the landing site, soil sampling and exobiology in-situ analysis, as well as mastering emergency situations.
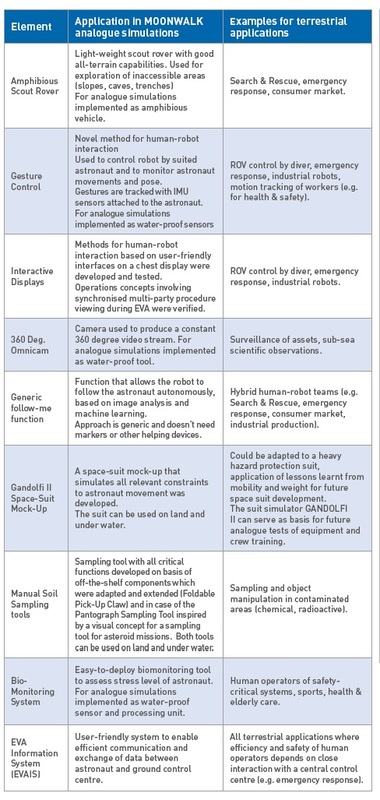
The feasibility of a small helper rover (YEMO) to support astronauts in the exploration of planetary surfaces, and in particular of areas that are too dangerous for an astronaut to access (e.g. caves and steep slopes of craters or rims), was evaluated. The rover carried a set of newly developed manual sampling tools, a sample storage unit and a portable RAMAN spectrometer.
Because robot development per se was not the focus of the MOONWALK project, YEMO was a relatively simple robot with limited capabilities. However, depending on their size and configuration, advanced helper robots in human-robot teams may support astronauts even with more complex tasks, like carrying material and equipment, assisting in the installation of instruments, sampling independently, or supporting emergency procedures.
The purpose of the technologies developed in MOONWALK was the evaluation of human-robot space cooperation and the development of hardware in Europe for analogue simulations. However, most of them also have a significant potential for innovation in terrestrial applications.
Enablers for innovation
Individual technical components developed by the seven MOONWALK partners were combined in an integrated mission-architecture which served as the basis for the Martian and lunar trials of the project.
To be able to exist in the hostile environment of space, astronauts must wear heavy and bulky space suits. Even under zero gravity conditions, these suits significantly constrain natural human manoeuvrability and dexterity. What this implies for the design of both procedures and technical systems for a human, or human-robot space mission, can only be tested on Earth using realistic space-suit mock-ups.
In MOONWALK, the Marseille-based COMEX company developed a spacesuit mock-up that could simulate the constraints of a real spacesuit (such as the Z-1 series by NASA). The so-called ‘Gandolfi-II’ suit can be used both on land and under water (to simulate reduced or zero gravity conditions on the Moon or in orbit). Thus the suit is a valuable asset for Earth-analogue simulations of a wide range of space missions.
The Gandolfi-II suit comes, in the terrestrial configuration, close to the weight of a Z-1 suit (including life support system) on the Martian surface. Underwater it simulates the weight of such a suit on the Moon. Trials on the Martian terrestrial analogue have shown that long planetary EVAs with a suit of this weight might be a problem. Astronauts will have trouble wearing the device over longer periods of time and it might be necessary to either reduce the weight of future suits or develop specific devices to support the astronaut during long EVAs.
To be able to conduct sampling of loose soil or smaller rocks, two different tools were developed by LIQUIFER Systems Group which can be used single handedly and which can be folded and stored on the small rover.
The Pantograph Sampling Tool is based on existing pantograph tools. There is, however, neither a known demonstration of this particular concept nor knowledge of it having been prototyped for a space application. The MOONWALK design and development of such tool presents a novel contribution to its evolution.
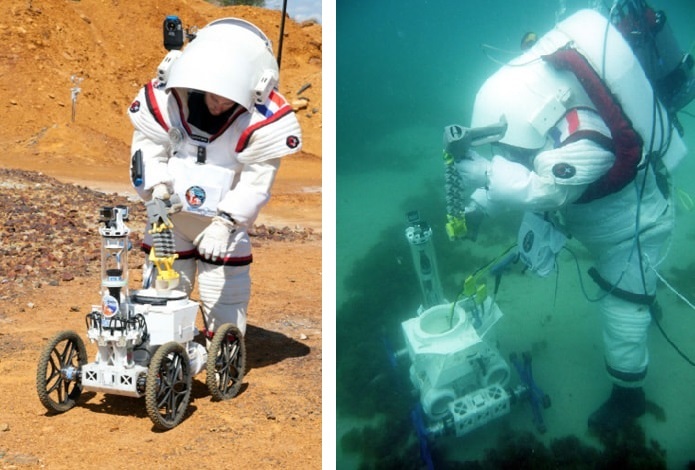 Gandolfi II space simulations suit and YEMO for ground (left) and underwater simulations (middle).
Gandolfi II space simulations suit and YEMO for ground (left) and underwater simulations (middle).
The pantograph enables ease of sampling. Its expandable arm prevents an astronaut from having to bend down (reducing the risk of falling) and offers an exchangeable scoop for sampling different material and different sizes of material. This dedicated sampling box for each sample is to avoid cross-contamination.
 Gandolfi II space simulations suit with chest-mounted display (procedure viewer).
Gandolfi II space simulations suit with chest-mounted display (procedure viewer).
The Foldable Pick-up Claw is used to collect smaller rocks, a special feature being the flexibility to allow an astronaut to inspect a sample in front of the visor.
Other tools specifically developed for the MOONWALK were an Astronaut Rescue Stick to be used to help a fallen astronaut get back up on his/her feet, and an Astronaut Tether Control that permits an astronaut to support (and stabilise) the rover, e.g. on a descent down a steep slope.
For potential spin-out to terrestrial applications, tools like the Pantograph Sampling Tool and the Foldable Pick-up Claw could be further developed for underwater operations where sensitivity to sample collection is important. The latter could be adapted to improve the translation of the grip of a human hand into a more sensitive mechanism at its head. Sample collection tools could also be used within harsh environments, including highly contaminated areas such as nuclear waste grounds and environmental cleanup sites, or extreme environments like Antarctica.
MOONWALK shows that the exploration and the exploitation of space is an enabler of new achievements and new technologies
Scout rover
The amphibious light-weight rover YEMO is based on the ASGUARD rover, both designed by DFKI Robotics Innovation Center in Bremen, Germany. YEMO can be equipped with different sets of wheels, in particular the ASGUARD star-wheels, which enable it to traverse difficult terrain and climb steep slopes. Such excellent all-terrain capabilities make YEMO a valuable tool to assist an astronaut in the exploration of interesting but difficult to reach locations. YEMO was equipped with a box to hold tools, samples and scientific instruments (e.g. a portable RAMAN spectroscope).
Future terrestrial applications might include rovers like YEMO and can be used in search and rescue, emergency response and even consumer robotics ( e.g. as domestic helpers). Their special design (star-wheels) and the relative low weight (starting from 10 kg) make them easy to deploy and allow them to climb stairs and move over uneven terrain better than other wheeled or tracked systems.
Omnidirectional camera
The YEMO rover was equipped with a water-tight version of an omni-directional camera (omnicam). This type of camera is able to record 360 degree videos without the need for moving parts. The 360 degree images can be flattened and any view selected at random, allowing several operators to work on the same video-stream simultaneously. Potential terrestrial applications might include surveillance robots or crawlers for underwater scientific observations.
Human Machine Interface (HMI)
A key objective of MOONWALK was to find a solution that allows an astronaut in a heavy space suit to control a robotic helper. A standard joystick interface is not suitable and though voice control is an option, loud background noise (caused by spacesuit air circulation) and the conflicting communication with ground control, it is not very practical. In MOONWALK, alternative astronaut-robot interfaces, including a chest-mounted display and control by gesture, were evaluated. Gesture control proved to be very useful and user-friendly during the simulations.
Gesture control
Gestures can be used to interact with and to control both static and mobile robots. In real world environments, particularly outdoors, gesture control promises to be more intuitive and practical than joysticks or other traditional devices for remote control.
Most systems for gesture control use 3D cameras or infrared sensors to trace the movements of the human operator. In MOONWALK, an innovative approach based on inertial measurement units (IMUs) attached to the upper limbs of the astronaut or integrated in the space suit was used. Using a small set of simple gestures, the astronaut was able to control the movements of the robot.
The major advantage of the IMU-based gesture control is that the astronaut can control the rover, and the rover can monitor the movements and pose of the astronaut, without the need to be in the direct line-of-sight and in conditions with poor visibility (e.g. sandstorm on Mars). On Earth this opens new interesting applications in areas of low visibility, or in ‘fields’ where many, potentially interfering moving objects, are typical. Examples are underwater environments, search & rescue, or even industrial applications. A potential future iteration of this development would be an ‘intelligent’ cloth, with sensors integrated in the fabric.
 Simulation astronaut supports rover on a steep slope.
Simulation astronaut supports rover on a steep slope.
Interactive displays
A more traditional approach for robot-control by a suited astronaut was the use of interactive displays. Both a chest-mounted and wrist-mounted unit were developed. Featuring simplified and basic user-interfaces, these tools allowed the astronaut to control the robot movements even while wearing bulky gloves. Like gesture control, the interactive displays could be used to control robots in many terrestrial outdoor and indoor applications.
Generic follow-me functionality
Such tools could be further developed for underwater operations where sensitivity to sample collection is important
The robot was equipped with the ability to follow the astronaut autonomously. The approach taken in MOONWALK was to enable the robot to identify the astronaut in the 360 degree video-stream provided by the omnicam. The robot used machine learning to learn the features of the astronaut. This generic approach does not need any markers or beacons attached to the astronaut and works for any relative constellation of rover and astronaut.
Bio-monitoring
Monitoring the physical state of an astronaut during an EVA is critical and the bio-monitoring system for MOONWALK, evolved by Airbus DS, consists of a heart rate measurement system that derives information on the different grades and types of stress in function of the heart rate variability (physical stress versus psychological stress). A sensor for measuring heart rate is placed directly on the astronaut’s skin - similar to a pulsemeter device worn by runners. The bio-monitoring sensor communicates with a receiver unit placed in near proximity, i.e. in the astronaut suit. Both units are commercial, off-the-shelf systems and are able to function underwater.
There are many terrestrial applications for this technology, including environments where humans work with safety-critical systems such as aircraft piloting, air traffic control, or where specialists operate attention-demanding machines. Integrated in smart cothing, biomonitoring systems based on the MOONWALK approach could even be used by athletes or to monitor the health of elderly people.
EVA Information System (EVAIS)
The EVAIS developed by Space Applications Services, of Belgium, as part of MOONWALK was the first use of an advanced EVA information system in a water immersion partial gravity simulation. It is a prototype computer installed on the EVA suit allowing an astronaut to visualise procedures, and Base/Mission Control to monitor progress. It permits the exchange of voice, text, live video, annotated imagery and telemetry, and also serves as a means to operate the robot (using gesture control or interactive displays). A human-centered approach based on usability studies was used when designing the user interface.
The EVAIS software implements the YAMCS control centre software used to control payloads on the ISS. At the core of the data processing lies the Suit Computer Assembly (SCA), a centralised location for all the spacesuit avionics, including biomonitoring and gesture control.
 Space Applications Services
Space Applications Services
A version of the same system, modified to be lighter while widthstanding a dusty environment, was used on the ground for the Martian mission simulations.
Systems like EVAIS could be used for the organisation and control of first responders in emergencies and for other applications where the efficiency and safety of human operators depends on close interaction with a central control station.
The International Analogue Mission Control Centre (IAMCC) is located at Space Applications Services near Brussels. It has been designed to interact with the advanced spacesuit computer prototype and EVA information system designed for MOONWALK.
A team composed of experienced flight controllers for the ISS and experts in planetary science performed real-time operations and supported the mission from a central location. The IAMCC was responsible for all communications with the field operations during the Mars simulations. Here, the communications were delayed seven minutes (one way), and during the Moon simulation had a minimal delay of around one second.
 Simulation astronaut gesture controls the rover on a Martian exploration simulation.
Simulation astronaut gesture controls the rover on a Martian exploration simulation.
The results of MOONWALK show that the exploration and the exploitation of space is definitely an enabler of new achievements and new technologies. The extreme environmental conditions that are characteristic for space demand robust technical solutions that go beyond what is needed for average terrestrial applications.
For space robotics these are, in addition to reliable mechatronics, a high level of decisional autonomy and in the case of the MOONWALK rover, new methods for human-robot interaction.
 Gandolfi II space simulations suit for underwater simulations
Gandolfi II space simulations suit for underwater simulations
Human spaceflight is an important catalyst not only to initiate the conceptualisation of such solutions, but also to provide the inspiration to go the extra mile in actually achieving them.
Dr Thomas Vögele holds a PhD in Computer Science and Artificial Intelligence from Bremen.
University, and an MS in Geology from Freie Universität Berlin. He is the coordinator of project MOONWALK.
Dr Barbara Imhof, a space architect, is co-founder and managing director of LIQUIFER Systems Group, Vienna. In project MOONWALK she is responsible for the astronaut manual tools, scenario procedures and dissemination.
Dr Peter Weiss is the Head of the Space and Innovations Department at COMEX. He has 15 years of experience in the management of industrial and research projects in the field of deep-sea and space robotics and EVA simulations. In project MOONWALK he is the technical coordinator.