If humans are to travel farther into space, we will need new technologies and spaceflight experience that enables astronauts to operate independently of Earth. Crewed space missions over the last four decades have been either relatively short (lasting a few days or weeks) or relatively close to Earth, such as in the low-Earth orbit (LEO) of the International Space Station (ISS). Astronauts have depended on Earth for resupply and operational support, and, in an emergency, have often been able to return home in a few hours or days.
A human mission to Mars and back, however, could take around 500 days and would expose crews and spaceships to the harsh radioactive environment of deep space.
One of the ways that NASA is testing a number of the new technologies and capabilities that will directly enable future missions to Mars is through the proposed Asteroid Redirect Mission (ARM).1 This will include the first-ever robotic and crewed mission to identify, capture and redirect a near-Earth asteroid (NEA) in the area around the Moon. As cislunar space is similar to what a spacecraft would experience on the trip to and from Mars, it’s the ideal place to test the new capabilities.
The first phase of the mission would attempt to robotically place the NEA in a stable orbit around the Moon. Astronauts aboard NASA’s next-generation vehicles for human spaceflight, under development now, would then travel to the redirected asteroid in the 2020s.
Advancing spacecraft technologies
ARM will test a number of new space technologies to extend human spaceflight beyond LEO.
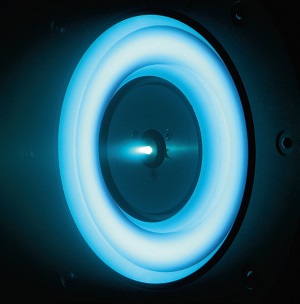
One of these is the use of advanced solar electric propulsion (SEP) to carry the spacecraft out to one of several candidate asteroids. Two primary mission options are currently under study by NASA.2 One approach, Option A, would rendezvous with a small NEA in its native orbit and then envelop it using a large deployable structure. Our reference concept for Option A is a mean diameter four-to-10-metre asteroid with a mass of up to ~1,000 metric tons. Option B would rendezvous with a larger NEA and capture a boulder-like mass, equivalent to a small asteroid, from the surface of the larger asteroid. Our reference concept for Option B is a two-to-four-metre diameter boulder with a mass of up to 70 metric tons from a larger NEA (over 100-metre diameter). With either option, substantial asteroid mass will be delivered to a stable lunar distant retrograde orbit (DRO).
SEP offers the advantage of very high-efficiency propulsion in which engines operate at very low thrust levels. It also provides an extremely cost-effective and mass-efficient approach for moving through space. SEP trajectories are longer duration than higher-thrust chemical trajectories. Traditional chemical propulsion stages are heavier and have lower efficiency but higher thrust, so they can go faster. NASA envisions SEP as usable for moving large elements through deep space for future missions, eventually transporting cargo to support a human Mars mission. The commercial spacecraft industry is also interested in advanced SEP for use in their applications, especially for moving large masses to geosynchronous Earth orbits.
NASA’s Space Technology Mission Directorate has been advancing the state-of-the-art SEP technologies resulting in several big accomplishments this year. Recent ground demonstrations of advanced solar arrays, ion thrusters and power processing technologies will enable advanced missions, such as ARM, across the industry.
Either ARM option would also use advanced technologies for the capture and control of so-called non-cooperative objects.
Planetary defence
When the ARM robotic vehicle is in close proximity to the target asteroid, NASA can demonstrate basic techniques that could inform future ‘slow push/pull’ planetary defence operations to prevent a hazardous asteroid impact on Earth. Option A allows for demonstration of an ion beam deflection method to manoeuvre or possibly de-spin the small asteroid prior to capture.6 This method uses a beam of quasi-neutral plasma from the electric propulsion system to impinge upon the NEA’s surface to create a force and a torque on the target. Option B is currently focusing on demonstrating enhanced gravity tractor operations, which includes the required extended close proximity operations to a NEA that is in the ‘potentially hazardous’ size range.7,8
For Option A, an advanced inflatable system would be used to envelop and capture the small asteroid. Inflatable systems can offer light-weight options for space systems and benefits in packaging efficiency. In fact, a commercial inflatable habitation system will be demonstrated next year on the ISS. NASA’s reference concept here includes inflatable structure options mounted on a rigid interface with the rest of the robotic mission spacecraft.
MegaFlex, one of the two types of solar array that are currently being built and tested. These arrays need to be light and flexible enough to be stowed for launch, large enough when unfurled to capture enough solar energy to provide high levels of electrical power, and durable enough to operate for long periods in Earth orbit or passing through the Van Allen radiation belts
For Option B, advanced robotic technologies would be used for capture of the asteroidal mass from the larger asteroid. Our current reference concept includes two seven-degrees-of-freedom arms, each with an end-effector tool and a contact and restraint subsystem. A microspine end effector gripper uses hundreds of fishhook-like spines to opportunistically grab the surface features of the boulder during capture. The contact and restraint system attenuates the forces during the spacecraft’s descent to the NEA’s surface, stabilises it while on the surface, and provides a mechanical push-off during ascent from the surface. Contact pads allow the collection of surface regolith that provides geological/geographical context samples in addition to the captured boulder.
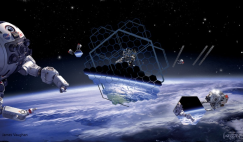
 An artist’s impression of option B: to retrieve a 2m-4m diameter boulder from a larger asteroid
An artist’s impression of option B: to retrieve a 2m-4m diameter boulder from a larger asteroid
The asteroid mass redirected to the stable lunar orbit is primarily dependent upon the capture system’s capabilities and orbital mechanics drivers, such as the launch date and velocity change (?V) required to rendezvous with the NEA and then return the captured material to the lunar DRO. For both options, high-power and high specific impulse SEP is the key enabling technology needed for providing the required ?V with a reasonable propellant expenditure and a reasonable total trip time.
Advancing human spaceflight
ARM will provide critical experience for astronauts beyond LEO, building on our knowledge gained on the ISS, and for testing new systems and capabilities toward the challenging goal of a crewed mission to Mars. In an early use of NASA’s next-generation human spaceflight vehicles, Orion and Space Launch System (SLS), our astronauts will travel to the redirected asteroid in the lunar DRO about 71,000 km above the surface of the Moon, farther than humans have ever travelled in space.
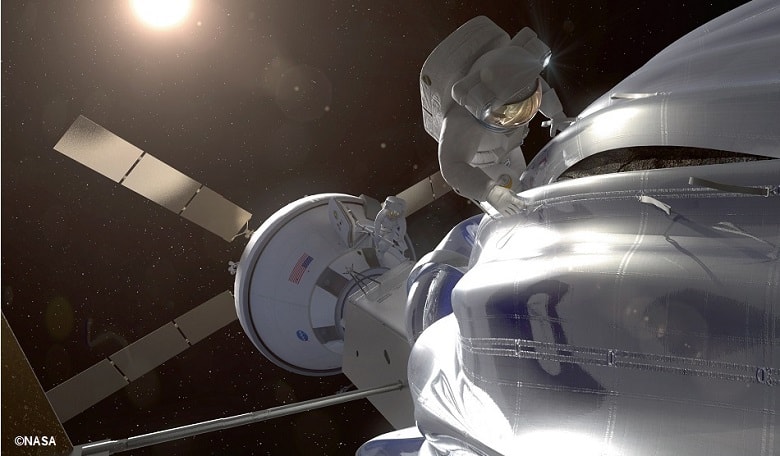
Astronauts will embark on complex in-space operations to explore, select, collect and secure samples from the asteroid
NASA’s first flight test of Orion on Exploration Flight Test-1, planned for this December, is an uncrewed mission in which the five primary elements of Orion will be operated in-flight and evaluated.3 These include separation of Orion’s launch abort system, crew module, service module panels, spacecraft adapter and fairing, and vehicle-to-space adapter. The flight will also test the entry heat shield and parachute systems. Orion will travel farther into space than any human spacecraft has gone in more than 40 years.
In the later, crewed mission the SLS will launch the astronauts in the Orion into cislunar space, allowing Orion to rendezvous and dock with the ARM robotic spacecraft to demonstrate early human exploration capabilities. The 25-28 day mission will use longer-duration operations in deep space than ever before and will allow NASA to test capabilities including life support, extra-vehicular activity (EVA) and rendezvous, docking and integrated vehicle attitude control, including for solar alignment and thermal management, in a deep space environment.4
ARM will provide a first opportunity for integrated human-robotic vehicle stack operations in deep space. Human spaceflight has several examples of crewed-robotic vehicle interaction in LEO, such as the Space Shuttle Hubble repair missions. Human-robotic vehicle interactions in deep space present new challenges as they develop new capabilities. The automated rendezvous sensor suite required to perform docking must function without the assistance of global positioning satellites for navigation and must operate more quickly than deep space network tracking can accommodate. Once docked, the crewed vehicle and robotic vehicle will have to work as an integrated stack.
NASA astronauts Stan Love and Stephen Bowen practice microgravity techniques using the new space suits and tools in the Neutral Buoyancy Lab at Johnson Space Center
Astronauts will embark on complex in-space operations to explore, select, collect and secure samples from the asteroid through multi-hour EVAs, or spacewalks, before returning the samples to Earth. These samples may include water embedded in the asteroid and minerals located in its regolith. Initial EVAs are envisioned to two different locations to identify, collect and contain samples for return to Earth.
Advanced EVA systems under development for exploration would also be used on this bold mission. Improvements to the modified advanced crew escape suit are being tested to assess multi-use of this suit. Advancements in a portable life-support system (a backpack-like suit attachment containing life-support elements) are being evaluated as well.
NASA is prototyping and testing suit upgrades in the Neutral Buoyancy Laboratory at Johnson Space Center, where astronauts can perform critical EVA tasks in the microgravity of water. These tests are also being used to examine candidate EVA activities for important aspects such as worksite stabilisation and sampling. Recent testing included the demonstration of two-handed tasks and pneumatic chiselling.
Vital stepping stone
ARM sampling and containment operations would be the first time that astronauts have collected and returned extraterrestrial samples to Earth since Apollo. ARM will help pave the way for future sample and collection activities for other solar system destinations (e.g. asteroids, or the moons or surface of Mars). New procedures would be developed for identifying samples based on their textural and mineralogical characteristics through a variety of remote sensing and in situ instruments.
Involvement and support from ground-based science teams would be invaluable for educating the astronauts on the best samples to obtain for further study. Newly developed tools and instruments will minimise the contamination of samples and allow much more sensitive measurements of pristine materials to be obtained once they are inside the laboratory on Earth.
As the scientific community’s understanding of solar system materials has evolved, there is increased recognition that some extraterrestrial samples are best returned inside well-sealed and climate-controlled containment devices.5 This is not only to protect the crew from contamination, but also to preserve the scientific integrity of the samples. This is especially crucial for samples from organic and volatile-rich objects, which are of interest from both a scientific and human exploration perspective.
Ultimately, testing these various state-of-the-art technologies and spaceflight capabilities through ARM will allow NASA to lower the costs of exploration by building systems that can be used and upgraded multiple times. It is a vital and exciting stepping-stone in the goal of human missions to Mars and beyond.
1 Gates et al, “The Asteroid Redirect Mission and Sustainable Human Exploration”, IAC paper 14.A5.1.1, 65th International Astronautical Congress, Toronto, Canada, October 2014.
2 Muirhead, B., “Asteroid Redirect Robotic Mission Overview”, presentation to the Small Bodies Assessment Group, http://www.lpi.usra.edu/sbag/meetings/jul2014/presentations/1030_Wed_Muirhead_ARM_OptionA.pdf, July 2014.
3 NASA Fact Sheet, http://www.nasa.gov/pdf/663703main_flighttest1_fs_051812.pdf.
4 Stich, S. “Asteroid Redirect Robotic Mission Overview”, presentation to the Small Bodies Assessment Group, http://www.lpi.usra.edu/sbag/meetings/jul2014/presentations/1030_Wed_Stitch_ARM_Crewed_Mission.pdf, July 2014.
5 Private communication, Curation and Planning Team for Extraterrestrial Materials (CAPTEM) Task Force findings, January 2014.
6 Bombardelli, C., et al., “The ion beam shepherd: A new concept for asteroid deflection”, Acta Astronautica, Vol. 90, Issue 1, September 2013, pp 98–102.
7 Mazanek, D.D., et al, “Asteroid Redirect Robotic Mission: Robotic Boulder Capture Option Overview”, AIAA SPACE 2014 Conference and Exposition, San Diego, CA, August 2014.
8 Yeomans, D., et al “Deflecting a Hazardous Near Earth Object”, presented at the 1st International Planetary Defense Conference, http://neo.jpl.nasa.gov/neo/pdc_paper.html, April 2009.
9 Brophy et al, “Synergies of Robotic Asteroid Redirection Technologies and Human Space Exploration”, IAC paper 14.A5.3-B3.6.7, 65th International Astronautical Congress, Toronto, Canada, October 2014.