The cruise towards Mars was the first opportunity to reduce the frequency of our contacts with Rosetta. We decided to go down to one contact per week and gain experience with that before pushing to longer periods. The spacecraft designers had invented a special attitude control mode for the quiet cruise phase, to save lifetime of some onboard units. This mode also restricted most of the operations on the spacecraft, allowing the ground teams also to relax and recover from the intensive efforts of the past years.
However, in summer 2005, two independent events woke us up from the dreams of a quiet cruise: first, at the beginning of August a temporary problem with an onboard thruster occurred, causing an anomalous change in Rosetta’s velocity and triggering concerns on the health of the spacecraft..
One month later, in early September, the Sun decided to frighten us, blinding the Rosetta Star Trackers by flooding them with charged particles from a large coronal mass ejection event. Both problems occurred when Rosetta was out of radio contact, and we just about managed to quickly recover back to a nominal situation.
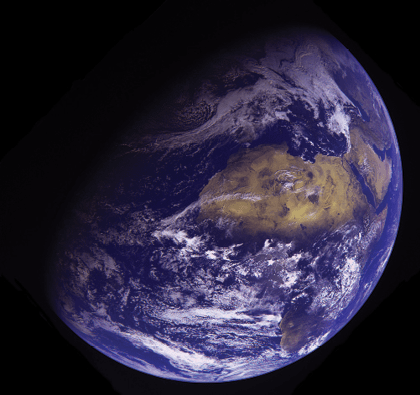 Earth Flyby 2 from the OSIRIS Camera.
Earth Flyby 2 from the OSIRIS Camera.
These alarming events indicated to us that it was better to abandon our plans just to contact the spacecraft on a monthly basis. We therefore implemented additional software checks onboard and decided that throughout the cruise we would contact the spacecraft at least once a week, to avoid further unpleasant surprises.
 The Flight Dynamics Team during the early cruise phase.
The Flight Dynamics Team during the early cruise phase.
In August 2006 another event, this time with far-reaching consequences, occurred out of sight: during a periodic check of the status of the propulsion system, we saw that the reading of the helium pressure in the isolated section of the gas lines above the pressure regulator had dropped to zero.
In summer 2005 two independent events woke us up from the dreams of a quiet cruise
We did not have continuous telemetry of this reading, as the pressure sensor electronics was only activated every few weeks, so we could not tell whether this was a sensor failure or a real pressure drop. The latter possibility was a frightening one: it meant that we had somewhere a leak of the helium gas on-board the spacecraft.
The spacecraft was safe at this time, as the potential leak was isolated. However, the re-pressurisation planned for 2011, before the large rendezvous manoeuvres, would re-open this section, exposing the spacecraft to a potentially high risk. But without a re-pressurisation we did not know if we would ever be able to reach the comet!
We had time until 2011 to think about the problem. Many tests and investigations on the ground were initiated. We suspected first the pressure sensor, then the pressure regulator, and in any case we tested strategies on how to fly the mission in case we concluded that we could not re-pressurise.
In the meantime, some further changes in the team occurred. At the end of 2006 Manfred Warhaut became head of the Mission Operations Department and I replaced him as head of our division, which was given responsibility of mission operations of all ESA scientific missions dealing with the Sun and the Solar System. As part of this job I was still in charge of the Rosetta mission, but I had to leave the spacecraft operations manager role.
Fortunately at this time Venus Express had reached a stable operations phase at Venus, and we decided to call back Andrea Accomazzo, who took my former position as Rosetta’s spacecraft operations manager. At the same time Elsa Montagnon was nominated spacecraft operations manager for the future BepiColombo mission to Mercury. She left the Rosetta team but was still in the division, in the same corridor, reachable in case of need. In this way we managed to absorb these career changes while keeping the people still involved, at different levels, in the continuation of the mission.
It was February 2007 when we finally arrived at Mars. Preparation work for this phase had been very complex due to the new trajectory that brought Rosetta into the shadow of Mars for 24 minutes around closest approach. At about the same time the spacecraft was also occulted by the red planet, so that we would also have a planned interruption of the signal.
Chema Morales in the Rosetta team had taken the lead in preparing this phase and had to face all sorts of challenges, from convincing scientists that we had to switch off their instruments around closest approach to save power, to analysing, planning and testing a configuration of the spacecraft that would reduce the active units to the absolutely essential ones, in order to ensure a ‘survival’ over the 24 minutes eclipse. Finally the Rosetta onboard software also had to be configured such that the spacecraft would not react to the loss of Sun presence by triggering survival modes.
 Rosetta flight control team during Lutetia fly-by.
Rosetta flight control team during Lutetia fly-by.
The flyby occurred very early in the morning on 25 February 2007. We had put together a mission control team and I was now, for the first time, flight director for Rosetta. The tension in the main control room was high when at 03:13 we lost the radio signal as the spacecraft disappeared behind Mars. We knew that two minutes later the eclipse would start, out of sight. The relief was equally huge when, at 03:28 as planned, we saw Rosetta’s S-band radio carrier reappearing on the other side of the planet. The eclipse finished at 03:40 and 10 minutes later the spacecraft could reactivate full telemetry transmission and we saw that it was perfectly healthy: another milestone achieved on the long journey to the target comet!
As predicted, Mars had deflected our trajectory back to Earth, which we reached in November 2007, for the second swing-by to accelerate the spacecraft. With the experience of the first Earth swing-by back in 2005, we performed all critical activities very smoothly. Immediately afterwards we started preparing for the next challenge: the first asteroid fly-by ever attempted by a European spacecraft.
The tests unfortunately confirmed the leak was real and that the only way to keep it isolated was not to repressurise
The target was asteroid 2867-Šteins, and the fly-by planned for 5 September 2008, at a distance of 800 km and a relative velocity of 8.6 km/s. Again we had to design completely new procedures and our flight dynamics team took over the operations of the navigation camera. First the camera was used as an optical navigation tool, to reduce the inaccuracy of our knowledge of the relative position between Rosetta and the asteroid: by taking pictures of the asteroid in the weeks before the approach and measuring its apparent movement in the sky related to the stars, its position in the two directions perpendicular to the Rosetta direction of flight could be determined with the necessary accuracy.
The navigation camera was also going to be used by the attitude control software onboard to steer the spacecraft during the closest approach phase such that the camera and other science instruments would be continuously pointing at the asteroid. In the morning of the day of the fly-by our flight dynamics team had to struggle with the camera, which did not manage to determine in a stable way the position of the asteroid in its field of view: noise level in the background was higher than expected due to the presence of pixels with considerably higher signal rate above the mean background.
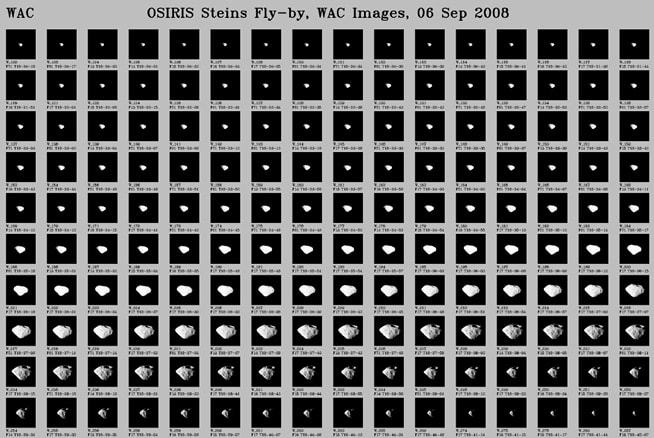 Osiris images of Steins during fly-by.
Osiris images of Steins during fly-by.
By frantically trying different parameter set-ups in the camera and the AOCS they eventually managed to get a stable pointing solution, thus making the fly-by a success. All Rosetta remote sensing instruments operated throughout the phase and the OSIRIS scientific camera delivered images of the 5 km asteroid Šteins, revealing a fascinating, diamond-like shape and a number of interesting surface features.
In late 2009 we performed an onboard test to discriminate between the various possible causes of the low helium pressure reading back in August 2006 (we had waited until we were back to short distances to Earth to be able to intervene rapidly in real time in case of problems). The tests unfortunately confirmed the leak was real and that the only way to keep it isolated was not to re-pressurise.
After confirmation from the manufacturer that the thrusters could work below the minimum qualification pressure of 7 Bar, we implemented some measures to minimise the inefficiency of fuel use at low pressures and changed the post-hibernation manoeuvres strategy: mainly thanks to our flight dynamics team and their perfect navigation skills we had found a way to perform the mission with low pressure in the tanks, thus avoiding the risks of re-pressurisation.
After the second and last spectacular asteroid fly-by of the mission, 21-Lutetia on 10 July 2010, probably the hottest day of that short German summer, the team concentrated on preparing for the first part of the large trajectory manoeuvre needed to rendezvous with the comet. This manouevre would impose on the spacecraft an acceleration of about 1.6 km/s, to be performed in two almost equal legs, one before and one after the long hibernation arc around aphelion. The first leg, of almost 800 m/s, had to be split over several days in which we would activate the small onboard thrusters for several hours during the period of ground contact.
Of course we were a bit nervous: we had never performed with Rosetta such long duration burns, and we had only a couple of weeks margin in case something went wrong. The rendezvous manoeuvre had to be performed on time, otherwise we would never be able to reach the comet. On 17 January we performed the first planned large burn, lasting about six hours. It completed as planned but during the burn we noticed unexpected oscillations of the spacecraft attitude.
During the second burn on 18 January, suddenly the oscillations increased in magnitude and passed the two degree threshold which triggered a safe mode onboard the spacecraft, interrupting the burn. We had no idea what caused the attitude oscillations but we had no time to go into deep investigations.
By looking at the thrusters’ behaviour, we saw that the front thrusters had a temperature pattern during the burn that looked nominal, while the rear thrusters showed large temperature oscillations. So we configured the controller to operate the rear thrusters with the same off-modulation ratio of the front ones. Also, although we did not suspect the hardware, as a precaution we decided to perform the remaining burns using the redundant thrusters branch.
It was now time to prepare the long deep space hibernation phase - this phase had always been our nightmare
On 21 January we tried a burn of medium duration: the oscillations were still there but significantly reduced. So we decided to complete the manoeuvre in the new configuration: all remaining burns were successful (with the exception of the last trim when, due to a commanding mistake, another safe mode was triggered, scaring the hell out of us for a few hours).
 Lutetia from Osiris Camera at closest approach.
Lutetia from Osiris Camera at closest approach.
In early February 2011, Rosetta was finally on the right course to the comet. We did not know what the cause of the thrusters’ anomalous behaviour was, but we had found a mode that was good enough to perform the manoeuvre - and could be used also for the second leg, planned for 2014, in case by then the problem remained unsolved.
It was now time to prepare the long deep space hibernation phase. This phase had always been our nightmare: being forced to leave the spacecraft alone and out of contact with Earth for 2.5 years is the worst thing you can ever expose a mission controller to. But we had no choice. The large distances from the Sun did not give us enough electrical power to cope with possible failures and recovery modes. We had to switch our beloved spacecraft off.
On the 8 June 2011 the day to enter hibernation arrived: we spun up the spacecraft to keep it in a gyroscopically stabilised attitude, set a timer to automatically wake it up on 20 January 2014 at 10:00 UTC and, after a last verification of the correct dynamics of the spacecraft rotation, we sent the command to switch off the onboard transmitter. Rosetta was now alone in space - and we would only see it again, hopefully, in 2.5 years time.
Picture credits
Civa picture: ESA/Rosetta/Philae/Civa. OSIRIS pictures: ESA MPS for OSIRIS Team/ MPS/ UPD/LAM/ IAA/ RSSD/ INTA/ UPM/ DASP/ IDA